




出品丨虎嗅汽车组
作者丨周到
头图丨视觉中国
一直以来,智能驾驶功能“王不见王”的局面,如今要有变化了。
本月初,有特斯拉员工在进行直播时“无意”中泄露,FSD(Full-Self Driving,“完全自动驾驶”功能)的内测版V12疑似正在中国进行测试。显然,在解决了信息安全合规问题之后,在美国大杀四方的FSD,终于有望来中国和华为城区NCA一决高下了。
不过对于两家企业的高阶智驾产品,究竟谁在中国的表现会更厉害这个问题,外界一直有不少争论。一些人认为,中美两国的道路环境、交通规则和用户习惯都存在不小的区别,因此FSD来到中国注定会水土不服,在华为面前落得下风。
但是,几乎每一个交流的技术人士都告诉笔者,特斯拉在端到端架构上取得的领先优势,绝对不容小觑。因为在美国,已经实现量产的FSD BETA V12给到了全球车企与科技公司足够大的震撼。
那么问题来了,由特斯拉率先量产,且在国内被华为、蔚小理频频提及的端到端架构,到底是什么?特斯拉如今“仅剩”的这一项优势,其内部原理到底是什么?为此,虎嗅汽车暗信号团队经过多方访谈和调研,为大家呈现这一前沿和复杂概念背后,技术原理和工程难点到底有哪些。
端到端:这边猪进去,那边香肠出来
只要你在B站或者各类带有视频内容的社交网站上搜索“特斯拉?FSD V12”,就能看到大量美国车主晒出的FSD体验视频。在这些视频中,已经升级到最新系统的特斯拉汽车在繁忙的美国街道中,智驾表现堪称“类人”。
从上图可以看到,车主驾驶的Model Y在路遇园林工人锯下的树枝时几乎“没打磕巴”,在无需接管的状态下直接操纵车辆绕开了障碍物。
而在更多视频里,特斯拉汽车完成了太多当前其他品牌车型智驾功能没有的表现:面对正在施工的道路,在桩桶的引导下驶入对向车道逆行,并在施工路段结束后回到正向车道;在没有红绿灯的十字路口,准确遵循“STOP”标志停车并等到左侧车辆先行;在到达目的地后并不马上退出,并会在人类驾驶员没有给出进一步指令的前提下,自动靠边停车。而如果该地点无法靠边,便自动向前行驶寻找车位……
这一切实现的基础,便是智能驾驶的端到端架构。在笔者看来,这对于汽车而言可谓是第一个接近于ChatGPT的发明,将极大地改善智能驾驶体验。
所谓端到端(end-to-end)架构,其对应的是如今绝大多数车企采用的模块化架构。在过去,工程师们将一辆车的智能/自动驾驶分为感知、决策规划和控制分为三个模块:感知、决策和控制。
其中,感知模块通过车身传感器信息的接入,实现对道路中车辆、行人以及各类障碍物的识别,并完成对车辆自身的精确定位。决策和控制模块(Planing and Control)负责对于前方移动障碍物的轨迹、速度进行预判,并规划出车辆行进的路线,保障车辆安全行驶。最后,系统将计算得出的操作指令下发给油门、刹车和转向系统,操作车辆行驶。
对于这个架构,其实我们可以理解为“规则执行器”。无论是感知到障碍物特征,并基于数据库对其进行分类,还是在具体场景中根据周遭环境变化而进行相应的操作,系统都是根据一条条工程师写好的规则进行执行。在业内,模块化的智能/自动驾驶架构也叫做“rule-based”。
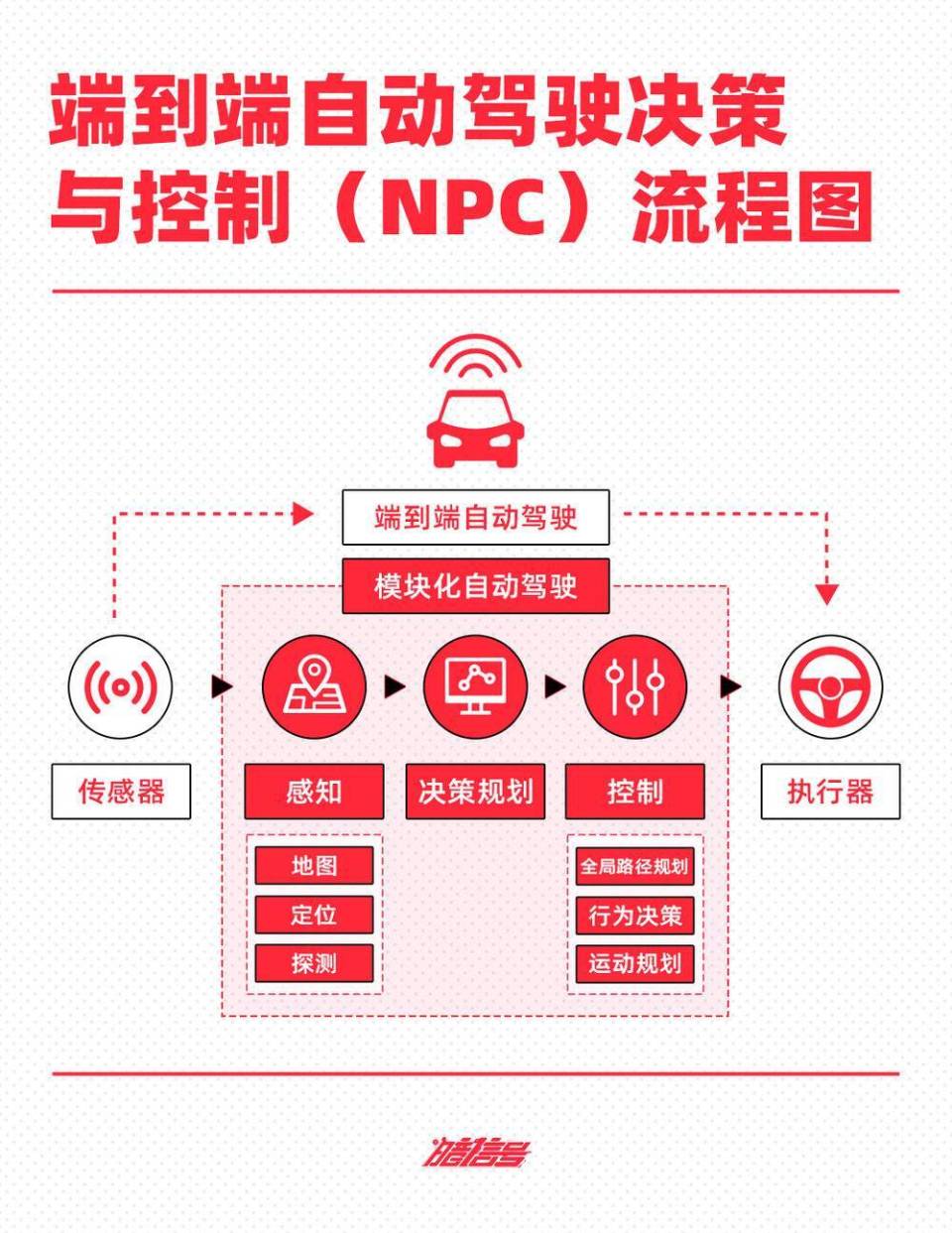
但端到端的架构下,系统将感知与PNC模块直接打包进了一个大模型。传感器的数据直接输入到模型中,经过计算后直接输出结果,发送给执行器。而大模型则是基于大量测试车辆以及用户实际驾驶的真实数据进行训练而成的,能够主动学习人类的驾驶习惯。
从上图中就可以看到,传感器通过大模型直接连接到了执行器,这就是所谓的“端到端”。用一个不恰当的例子来讲,这就相当于一个整体打包的食品生产线:这边猪跑进去,另一边香肠、卤煮、肉皮冻直接出来。
相比较模块化,端到端架构的优势显而易见。首先,系统不再是基于由工程师所编写的规则进行决策和控制,而是通过数据驱动(data-dirvien)实现成长,这就让系统处理问题具备了泛化的能力。
在过去,如果面对规则中不存在的场景,模块化架构的智能汽车往往会退出系统并提示驾驶员接管,抑或采取了错误的操作造成事故。而端到端架构则能够在面对极端场景(也就是corner case)时,像人类一样基于“直觉”采取包括绕行、避险乃至“硬开”等方式行驶,从而极大地提升安全性和用户体验。
其次,相比较由一条条规则和一个个模块构成的老系统,端到端架构能够在提升决策效率的同时,极大地降低了代码量。例如特斯拉就声称,FSD Beta V12系统相比较过去,减少了30万行代码。这不仅会降低车端的存储压力,还能极大提升系统的简洁度,从而改善运行效率。
最后,也是最重要的一点,端到端架构是一个真正的“大模型”,已经具备了人类驾驶员的部分特征。在未来随着模型训练数据量的不断提升和迭代,我们有望在端到端架构下成功打造汽车人工智能,并最终取代人类驾驶员,实现真正的L4级无人驾驶。
更重要的是,模块化的架构尽管在积累了足够多的策略后能在日常道路环境中顺畅行驶,但面对“计划外”的场景(也就是corner case)时,仍然会退出或做出错误决策。这不仅影响用户体验,还会发生危险。
但真正形成了AI大模型能力的端到端架构不再基于既定的规则进行规划和控制,而是能够像人一样,凭借“经验”和乃至“直觉”开
 相关论坛
相关论坛
 热门广告
热门广告
